
PreciseFlex Robots for Industrial Automation

(3 kg payload) - Based on the proven PreciseFlex 400 PreciseFlex robot, the PreciseFlex c3 is optimized to meet the evolving demands of drug discovery and development labs. Compatible with IntelliGuide Vision and Servo Grippers for advanced sample handling and precision. Also compatible with the collaborative linear rails to extend the robot’s horizontal reach.
The PreciseFlex c3X has the same functionality as the PreciseFlex c3, but with an extended horizontal reach.

(5 kg payload) - Designed to work seamlessly alongside people and delicate equipment, the PreciseFlex c5 Robot delivers precision and sophistication in any environment.
The cylindrical column design and tall Z-axis allow the c5 to effortlessly access racks, shelves, and equipment unlike other robots. Integrates seamlessly with IntelliGuide Vision, Servo Grippers, and Collaborative Linear Rails. The embedded controls minimize deployment complexity saving time and cost.
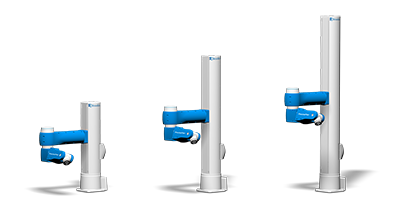
(8 kg payload) - The latest generation of PreciseFlex robot with 6-axis articulation, tall Z-axis, and large cylindrical work envelope.
Available with 500, 1000, and 1420 mm vertical reach, the cylindrical column work envelope keeps the footprint small and enables reaching into shelves, racks, and machines.
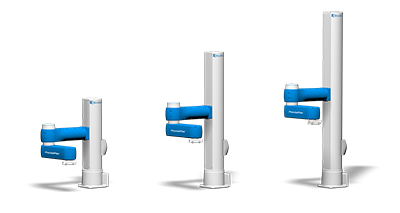
(10 kg payload) - The latest generation of PreciseFlex robot with tall Z-axis and large cylindrical work envelope.
Available with 500, 1000, and 1420 mm vertical reach, the cylindrical column work envelope keeps the footprint small and enables reaching into shelves, racks, and machines.

(3kg payload) - Ideal for small parts handling, kitting, and electronics testing.
Available with 400, 750, and 1160 mm vertical reach, the cylindrical column work envelope keeps the footprint small and enables reaching into shelves, racks, and machines.
The PreciseFlex 3400 is also available with an optional collaborative Linear Rail to extend the robot's reach up to 2.0 meters.

(3-6 kg payload) - The only PreciseFlex Cartesian robot that offers a space-saving design with speed and safety.
Available with 685mm and 1270mm X-axis, and 230 mm Z-axis the PreciseFlex 100 is a bolt-on PreciseFlex robot that can be mounted over existing conveyors and other equipment.

Deploying PreciseFlex robots into unstructured and semi-structured applications just got easier. We've embedded vision into our widely adopted servo grippers.
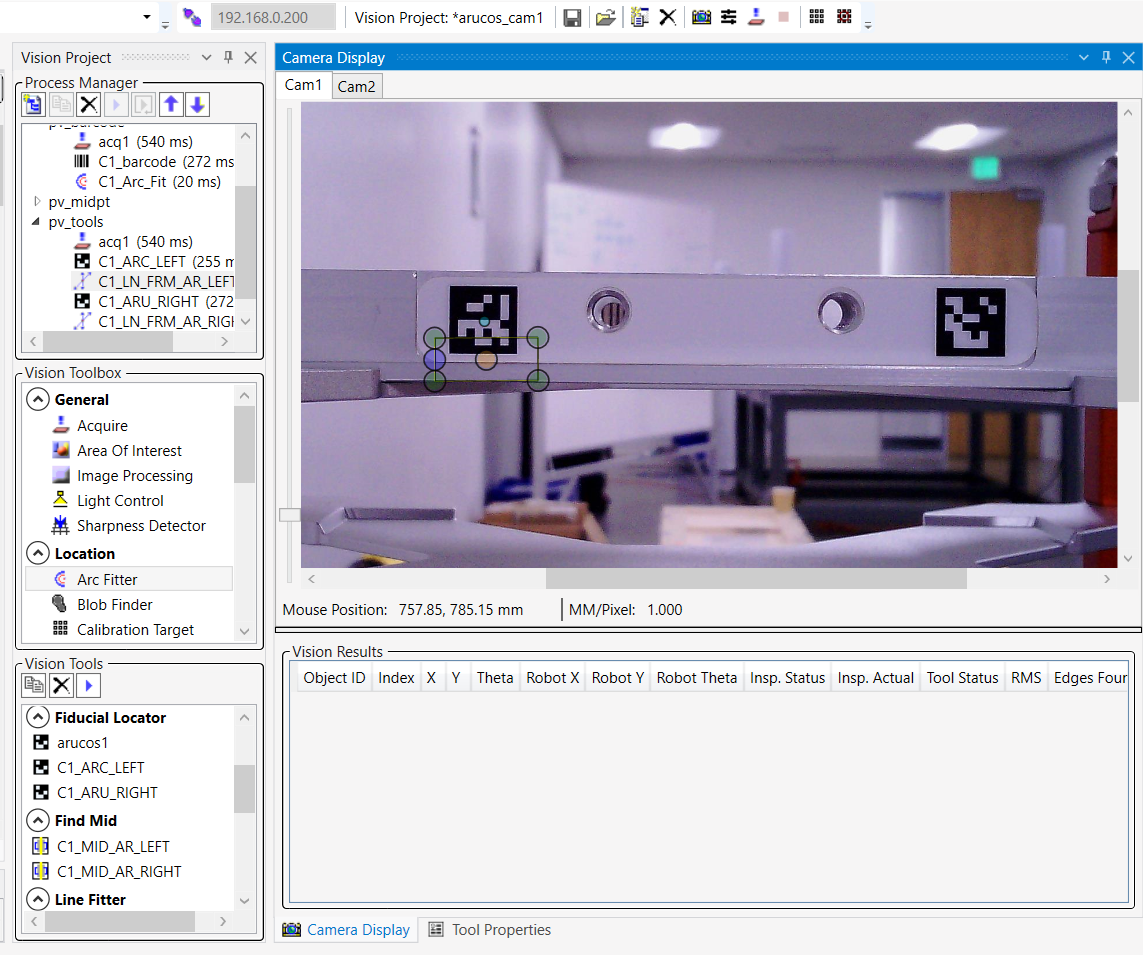
PreciseVision is a machine vision software package which effectively giving our robot "eyes" enabling them to work in less structured applications. It includes a powerful set of tools for locating, identifying, measuring, and inspecting parts.
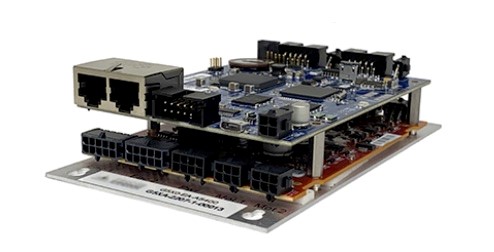
The Guidance Motion Controller is a compact and cost-effective motion controller package for high volume OEMs. It is a vision-guided, multi-axis robotic controller, complete with motion control, drives, IO, network communications, machine vision, and conveyor tracking capabilities.

Authorized System Integration and Distribution Partners
